みなさんこんにちは、全てを嫁に制御されている氷河期の住人だよ。
今回もちょっとディープなお話、PID制御についてです。
・・・PID制御はごぞんじですか?
昔からあるフィードバック制御で、いまだにPIDがポピュラーな制御法です。詳細はこちら↓

仕事やご家庭で「何か液体の温度を安定させたい・・・」という時とかに使えますので、覚えておくとすごく便利です。
この記事は機械屋さん向けです。なので難しいことは書きません。
さて今回はこのPID制御を現場で簡単に調整する方法ですが、ここでは限界感度法で調整する方法をご紹介します。18年前から、私が調整するときにまず最初にやる方法です。
今回は数式はほぼ使用しません。波形(の絵)を見ながら感覚でつかんでみてください。じっさい現場では途中から感覚でチューニングしますから・・
これを知ってるのと知らないのとでは調整の時間が大きく変わってきます。特に自分で設計したものは、自分で制御まで調整したいものですね!
PID制御を簡単に調整する方法まとめ!
目次(クリックできるよ!)
PID制御とは?使わない場合と比較してみよう

もしPID制御を使わなかったら?
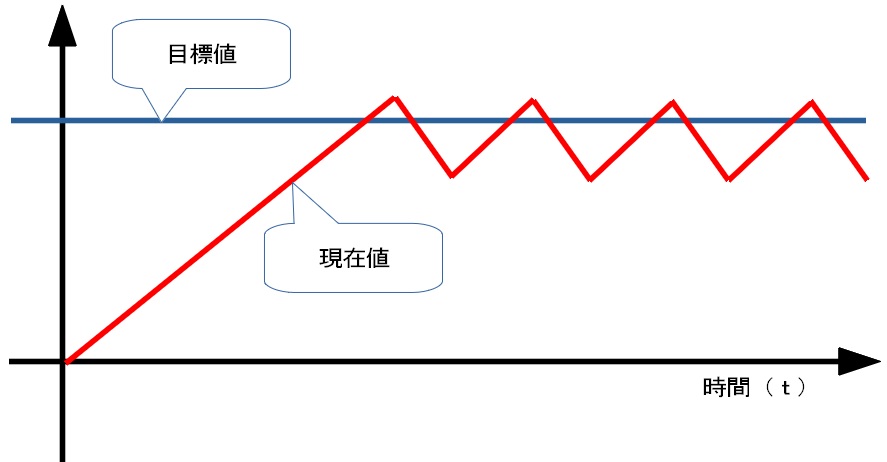
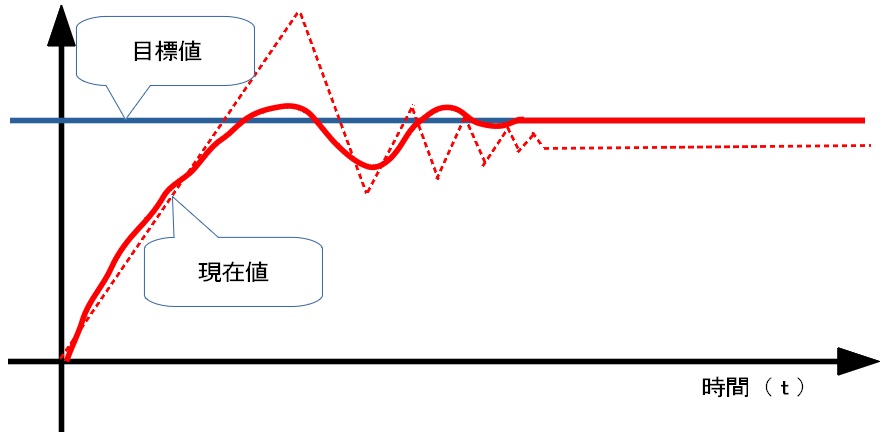
ではPID制御をかける前の、とある機械の動きを見てみましょう。
なんらかの目標値に向かって機械を制御するのですが、目標値に到達するまでに割と時間がかかります。しかも目標値で止めることができないので、目標値付近でジグザグの波形になります。
これではとても使い物にならないですね。
PID制御を細かく見てみる
PID制御と言いますが、PIDは比例動作(Proportional)、積分動作(Integral)、微分動作(Derivative)の頭文字の略です。それぞれが違う役割をもって目標値に近づけていきます。
P:比例動作
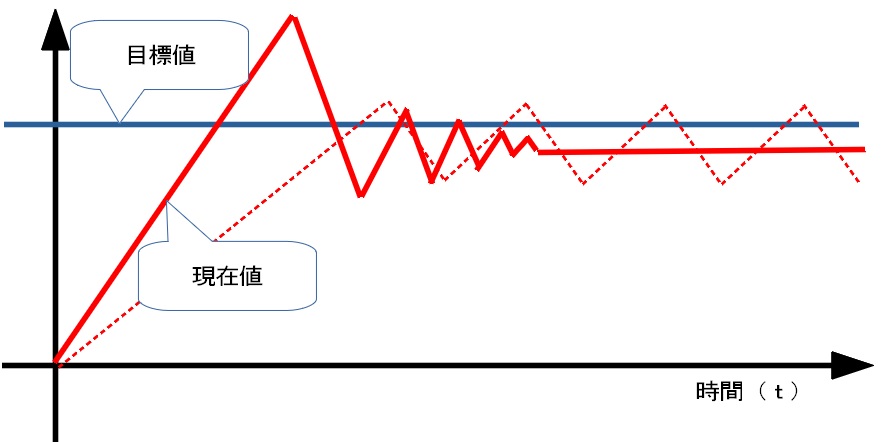
そもそも制御量は「目標値-現在値」で決まります。現在値が近づくにつれて、制御量が小さくなるイメージです。
比例動作は、これに係数を掛けます。制御量を増やして(減らす場合もあるかも)目標に早く近づけます。
ただ制御量が増えるので、オーバーシュート(目標値を大きく通り越す)が出やすくなります。それともう一つ、制御が落ち着いてくると、現在値が目標値にから少し離れたところにとどまろうとすることがわかります。これはP制御では寄せることができません。
I:積分動作
積分と書いてますが、偏差を積算したものを制御量に加えるのが積分動作です。つまりP動作で偏差が残っていましたが、I動作で貯めた偏差を制御量に替えて、寄せていくことができます。
D:微分動作
・・・PIの時点で追従できてしまいました。
じゃあDって何なの?って話です。Dは微分、言い換えると前回の偏差と今回の偏差の差を制御量にしようというものです。
外乱などで突然制御が乱れたときに、それをすぐ補正するというのがD動作の使い方です。しかし外乱がある程度わかった状態で入れないとすぐ不安定になるので、実際はPI制御で済ませてしまうことが多いのです。
実際にPIDチューンをする方法(限界感度法)
それでは実際のチューニングをやってみましょう。
上記Wikipediaでも書いてありますが、限界感度法を使います。
-
- IとDは0にする
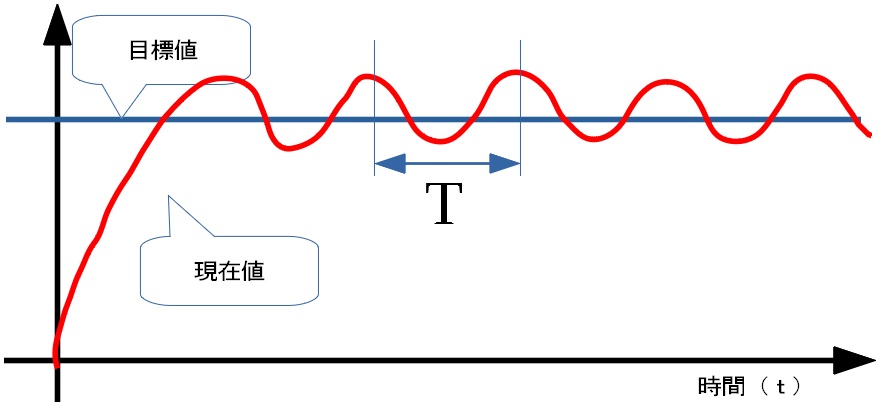
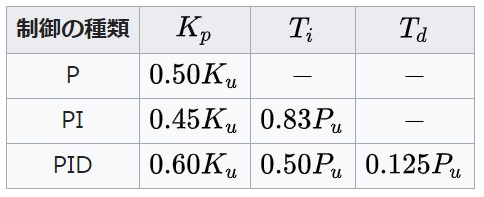
- Pを上げていき、安定を通り越して発振するまで上げる。この時のPの値(Ku)と周期T(Ti)を控えておく

- 以下の表に入れる(Wikipedia PID制御より)
ちなみにKi = Kp / Ti
手順は以上です。
あとは波形を見ながら微調整します。だいたいこれでチューニングはできます。
おわりに
ここまで読んで頂き、ありがとうございました。
限界感度法をそのままやっただけですが、これだと特に難しい知識や計算はいらないですね。
自分で調整できるようになると、いちいち人に頼まなくていいので仕事がはかどります。
さっそく実践してみましょう!
~オススメ記事~
モチベーションがあればどんなことでもできます。大変なんですけど・・
できないことを投げてはいけない、つまり人の上に立つにはできないといけないんです・・